Manuel d’utilisation du bras robotique PhotoRobot V8

Le manuel d’installation suivant fournit des instructions techniques pour la configuration et l’utilisation du bras robotique V8 de PhotoRobot. Ces informations visent à soutenir la première configuration et la première utilisation du bras robotique par le client. Il se concentre sur les nouveaux clients qui ont récemment acheté l’appareil, ainsi que sur l’intégration future des opérateurs de ligne de production.
Important: Référez-vous toujours aux informations et instructions de sécurité de PhotoRobot avant de procéder à l’auto-installation, à la première utilisation, au stockage ou à l’entretien des appareils PhotoRobot.
Installation et première utilisation du bras robotique V8
Merci d’avoir acheté votre appareil PhotoRobot. Vous avez choisi un produit qui apporte avec lui des décennies d’expérience professionnelle et d’innovation. Ingénieux et élégant, le design de PhotoRobot est conçu pour vous. Cela signifie que chaque fois que vous utilisez PhotoRobot, vous pouvez être assuré que vous obtiendrez d’excellents résultats à chaque fois. Bienvenue chez PhotoRobot.
1. Description du produit
Le V8 du bras robotique est conçu pour la capture automatisée de rotations sur plusieurs rangées, ou la photographie rapide d’une série de photos fixes depuis différentes élévations. Il est capable de déplacer la caméra le long de deux axes avec une précision robotique fluide, contrôlant l’élévation et le balancement. L’Arm se combine avec des dispositifs de platine photographiques compatibles comme la table sans centre ainsi que la platine robotique, les platines de classe C, et bien d’autres. Cela synchronise la capture d’image avec le mouvement de la caméra montée et la rotation du produit sur la platine.

Les principaux composants du bras robotique V8 sont les suivants :
- L’unité de contrôle du système (un dispositif séparé pour contrôler le bras robotique).
- Tiges de montage de l’appareil photo (une tige courte, une tige longue ou les deux).
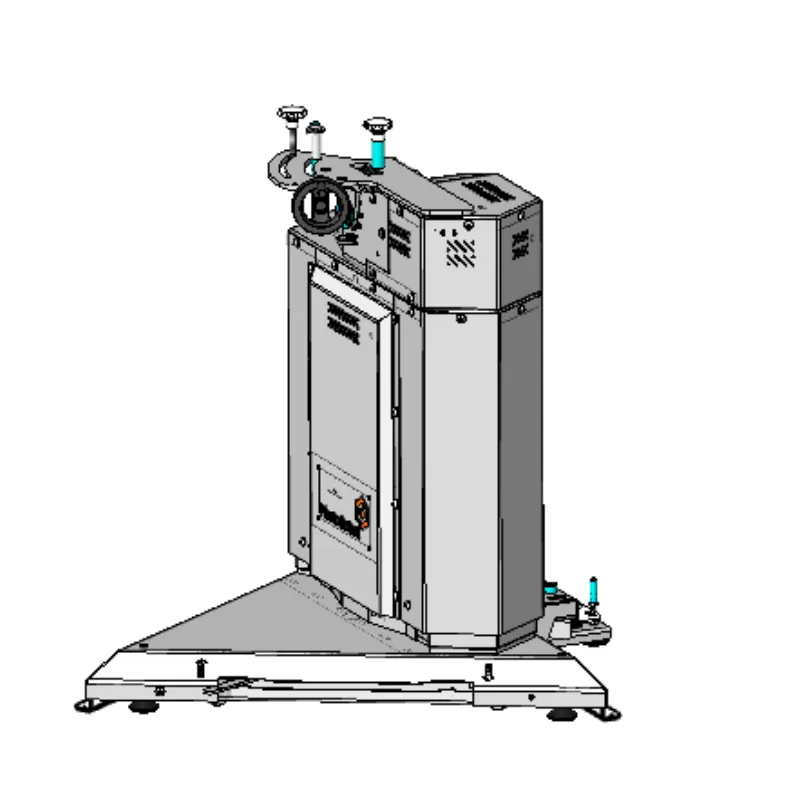
- Base de machine à bras robotique avec roues rétractables pour un transport facile.
- Station d’accueil pour une installation rapide avec des platines et des appareils compatibles.
Note: Le bras de la caméra n’oscille pas, déplaçant la caméra le long d’une trajectoire précise. Il existe également une large gamme de montage pour une flexibilité dans le choix des têtes de trépied et des caméras, ainsi que des fonctionnalités pour un transport et une configuration sans effort.
1.1. Bras robotique V8 Robot Aperçu
Le dispositif Robotic Arm est contrôlé par l’unité de contrôle. Cela signifie que l’unité de commande s’allume et contrôle tous les mouvements du _Arm V8.

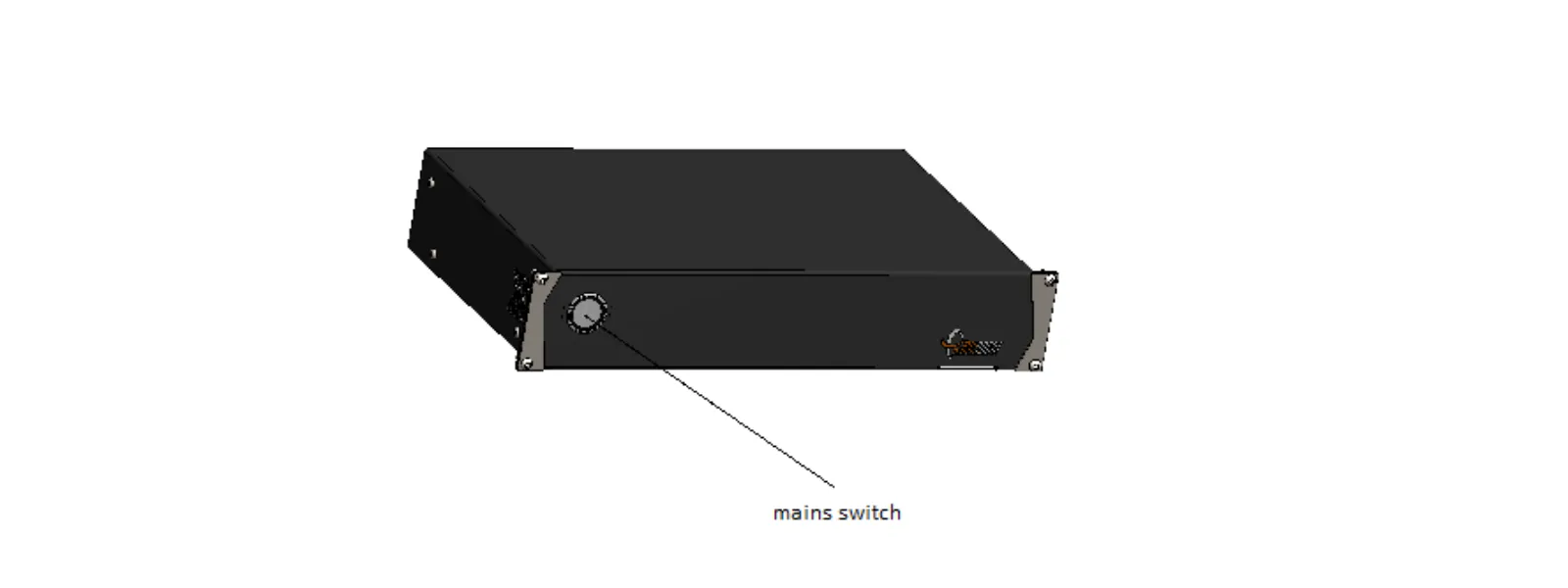
Note: L’unité de contrôle n’est pas une partie physique de cet appareil. Il est physiquement installé dans la table Centerless s’il est livré ensemble. Si l’Arm V8 est livré séparément, l’unité de commande est placée dans le boîtier de rack PhotoRobot HD dédié.
1.2. Connexion électrique
Les exigences de connexion électrique suivantes doivent également être respectées pour l’installation et le fonctionnement en toute sécurité du bras robotique V8.
- L’appareil doit être mis à la terre.
- Utilisez toujours une prise antichoc correctement installée.
- Assurez-vous que les informations électriques sur la plaque signalétique sont conformes à l’alimentation électrique. Si ce n’est pas le cas, contactez un électricien.
- Assurez-vous de ne pas endommager la fiche secteur ou le câble d’alimentation.
- Ne branchez la fiche secteur sur la prise secteur qu’à la fin de l’installation. Assurez-vous qu’il y a un accès à la prise secteur après l’installation.
- Ne touchez pas le câble d’alimentation ou la fiche secteur avec les mains mouillées.
- Ne tirez pas sur le câble d’alimentation pour débrancher l’appareil. Appuyez toujours d’abord sur l’interrupteur secteur de l’unité de commande.
- Ne vous approchez pas du _Arm V8 en mouvement ou lorsqu’il est sous tension.
- Gardez toujours à l’esprit la zone de travail de cet appareil.
- La portée de l’élévateur est de 32 cm.
- La plage du bras oscillant est de 0 à 90 degrés.
Important: La première installation après la livraison du fabricant doit être effectuée uniquement par une autorité autorisée par PhotoRobot. L’autorité doit être un distributeur agréé, ou le fabricant lui-même. Pour l’auto-installation et l’entretien, reportez-vous toujours également aux informations et instructions de sécurité de PhotoRobot avant de continuer.
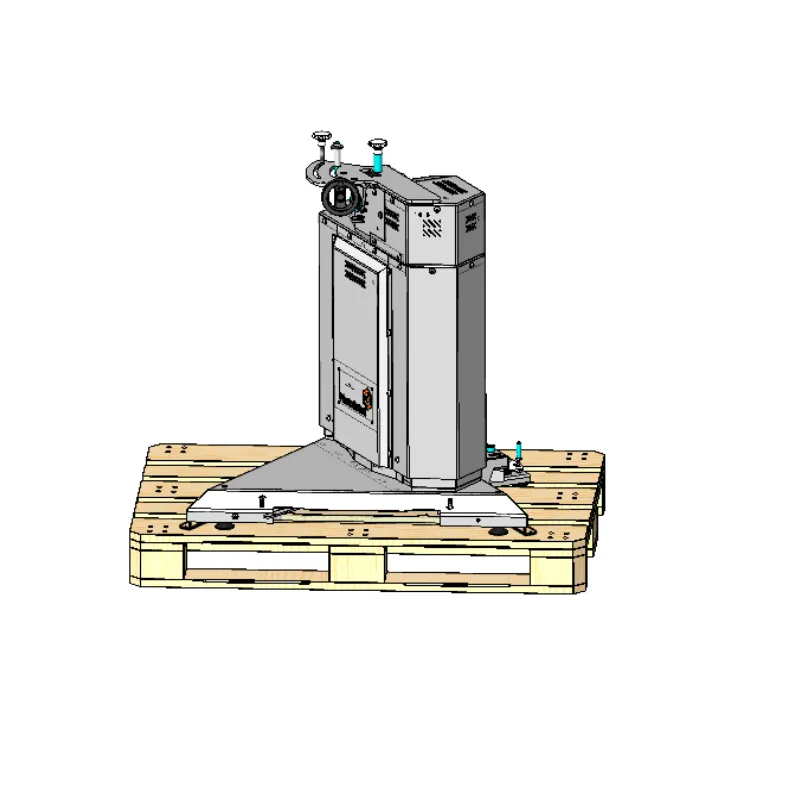
2. Préparation du _Arm V8 pour le fonctionnement
2.1. Selon la configuration fournie, il peut y avoir une tige courte, une tige longue ou les deux.
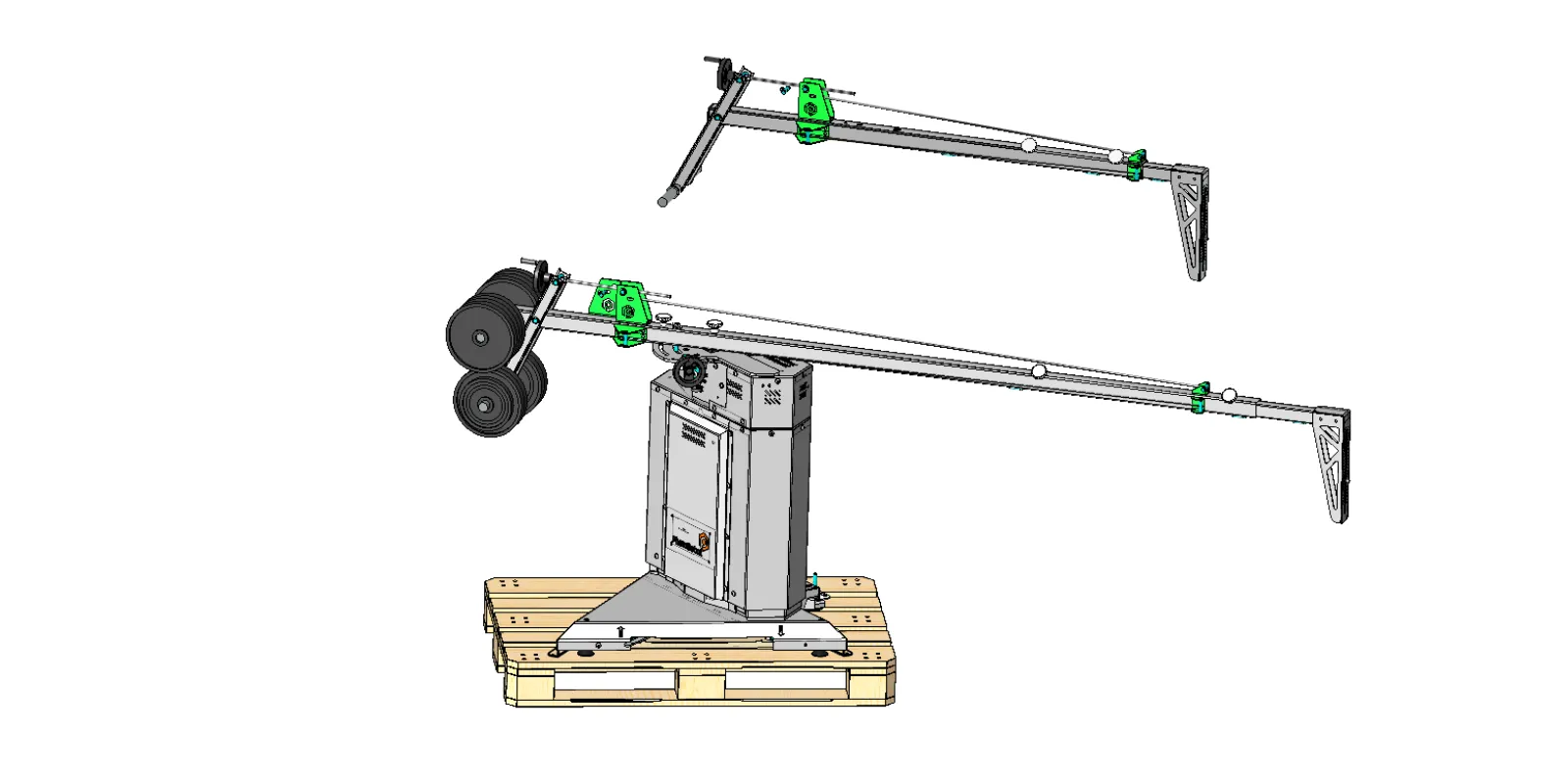
2.2. Déballez toutes les pièces et retirez la base de la palette.
2.3. Configurez la partie supérieure du _Arm V8 pour monter la tige. Retirez les accessoires de fixation, comme les écrous et la rondelle.
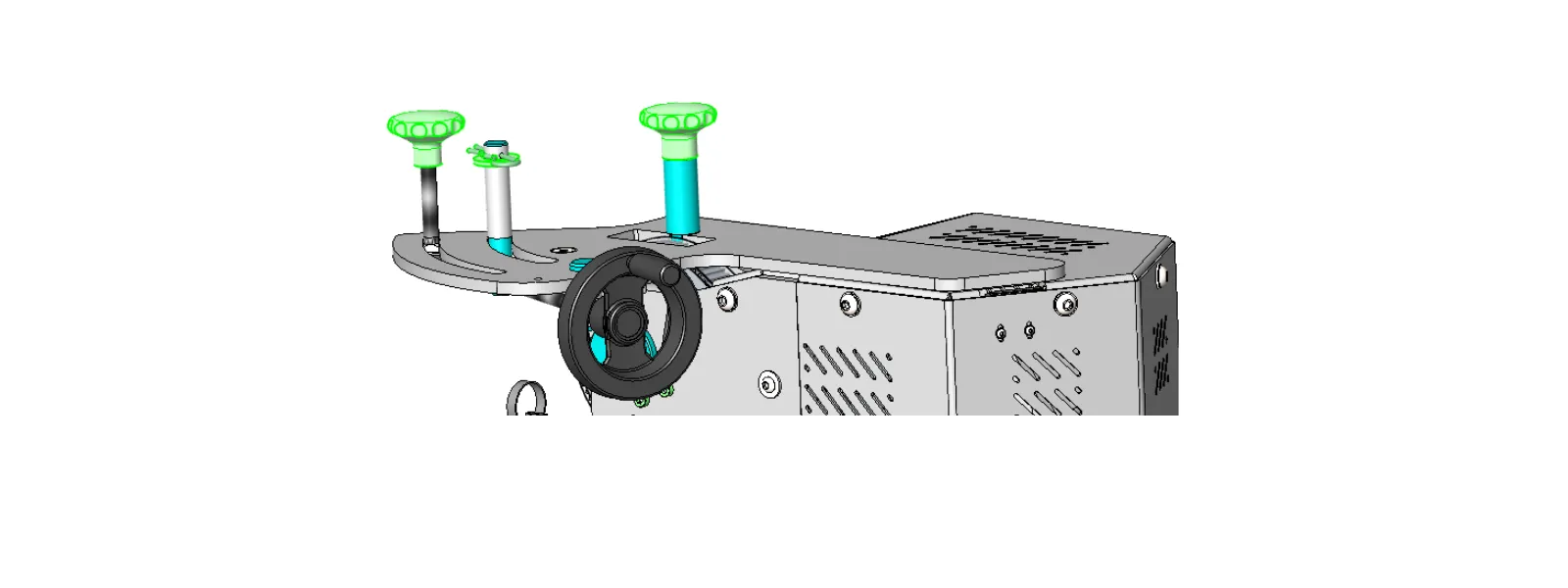
2.4. Positionnez la tige sur la base du bras et fixez toutes les pièces de protection.
2.5. Récupérez la tête d’engrenage Manfrotto et préparez-la pour le montage sur le bras.

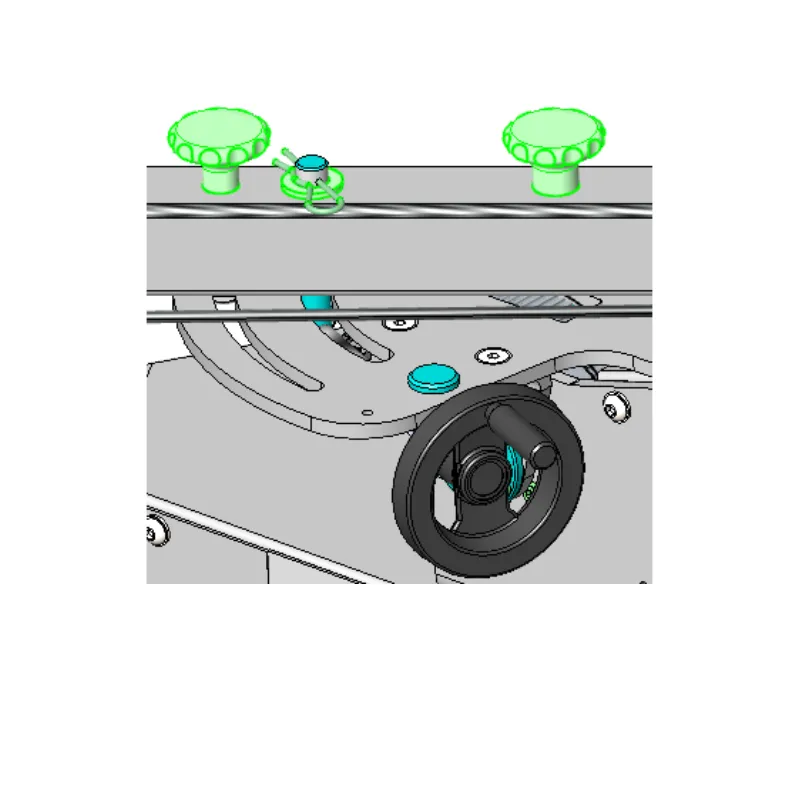
2.6. Fixez la tête d’engrenage Manfrotto en la vissant sur la tige, puis mettez-la à niveau à l’aide des poignées réglables 1,2,3.

2.7. Montez l’appareil photo sur la tête d’engrenage Manfrotto et ajoutez quelques poids sur le côté opposé de la tige. Ces poids doivent compenser le poids de l’appareil photo.
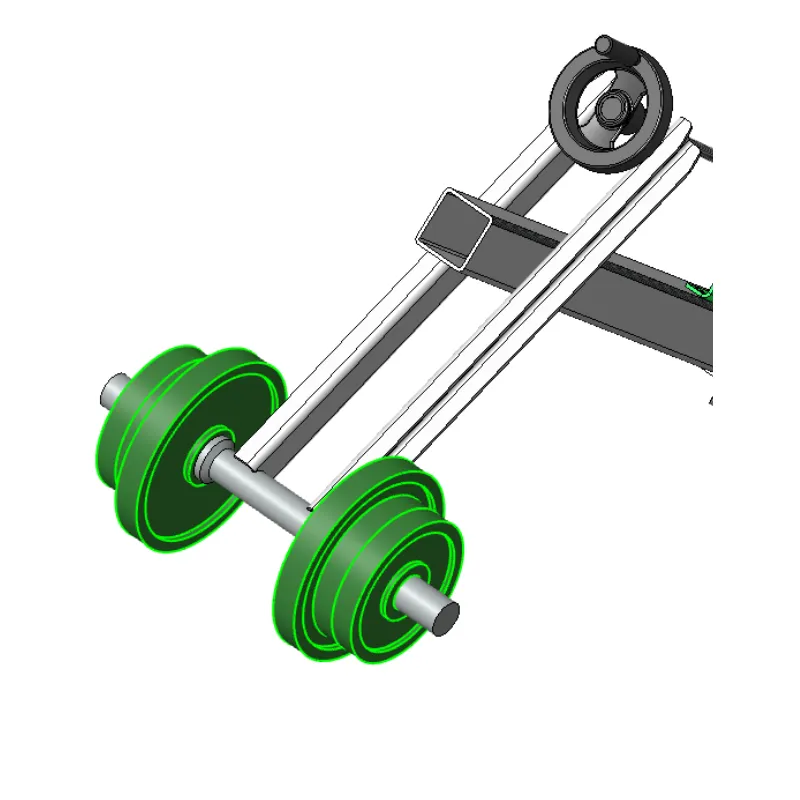
2.8. Notez que le poids de la caméra doit prévaloir légèrement afin d’appuyer sur l’interrupteur de fin de course lorsque le bras oscillant est en position basse (zéro degré).
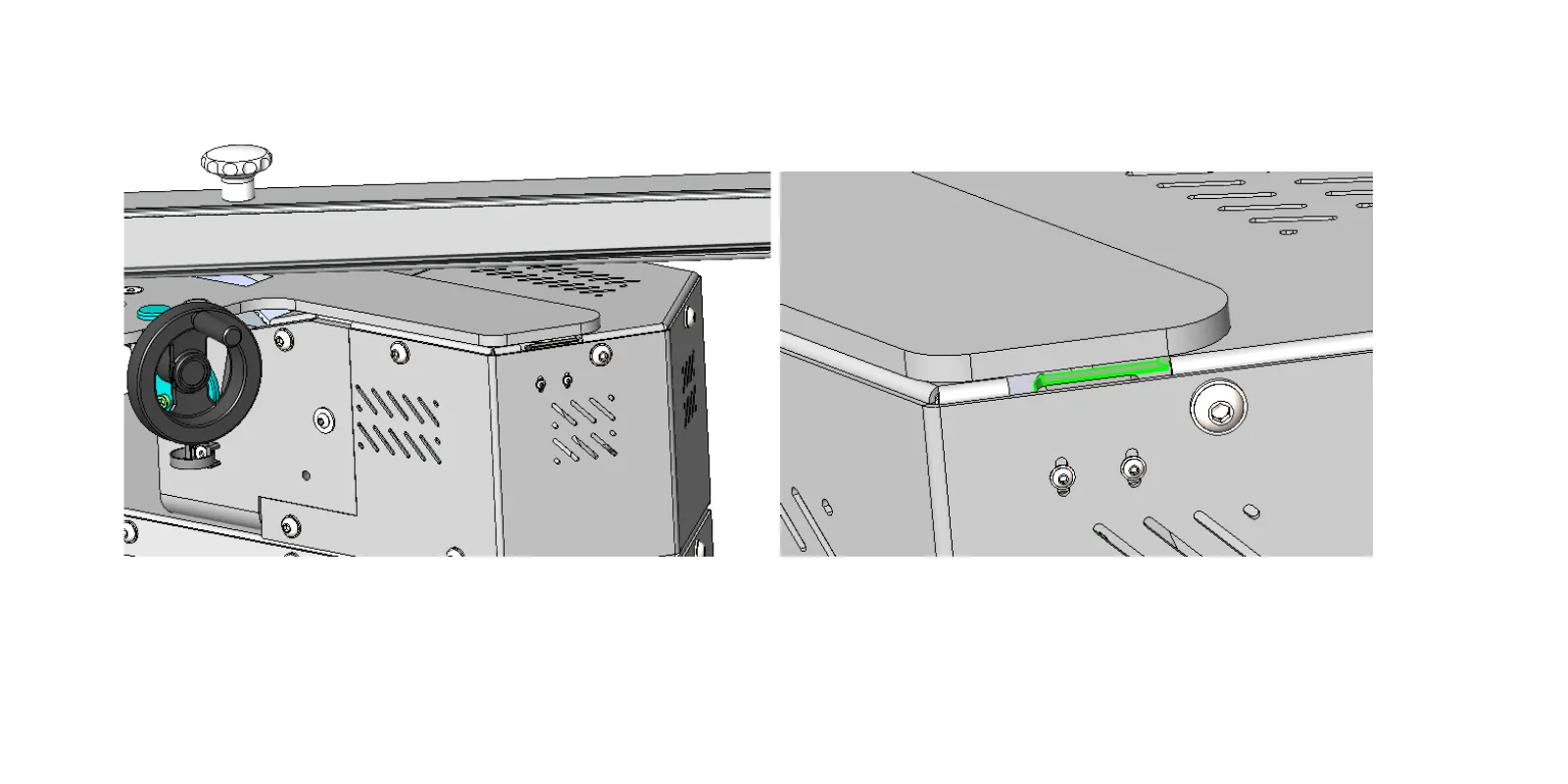
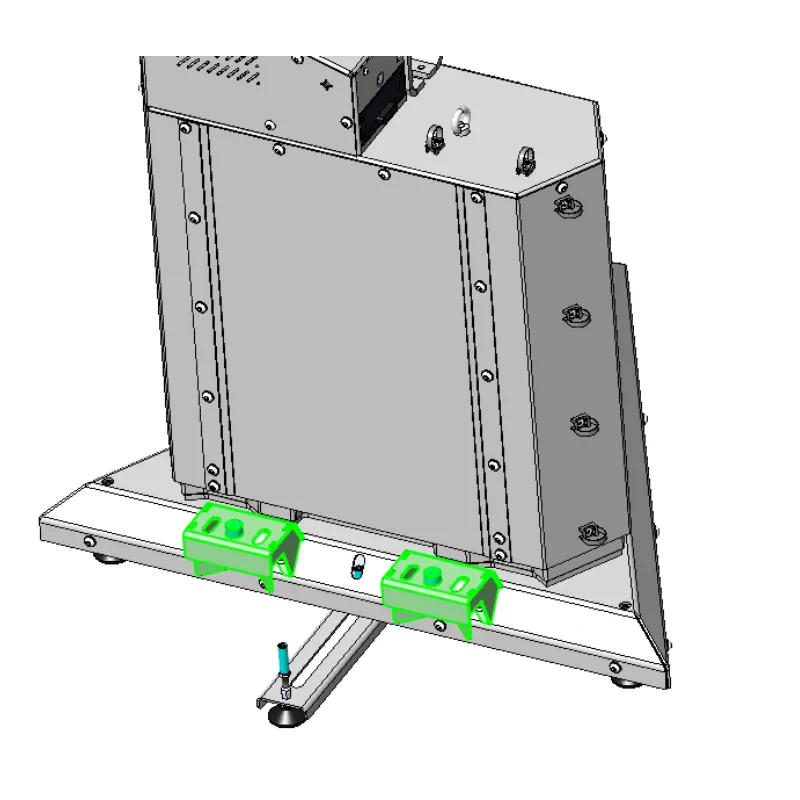
2.9. Montez deux pièces du mécanisme d’amarrage sur le _Arm V8.
3. Première utilisation de PhotoRobot
Avant la première utilisation, comprenez le concept de cette solution. PhotoRobot est un équipement révolutionnaire tout-en-un pour automatiser la photographie. D’un point de vue technique, il s’agit d’une unité modulaire composée de matériel et de logiciels. On s’attend à ce que PhotoRobot lui-même soit connecté au même réseau que l’ordinateur qui l’exploite.
Important: Veuillez toujours consulter PhotoRobot First Use & Basic Testing pour les exigences techniques opérationnelles et les instructions sur la connexion de PhotoRobot au réseau.
En général, il y a les conditions suivantes à remplir.
- Une unité de contrôle PhotoRobot doit être connectée au réseau local.
- Un ordinateur est nécessaire pour exécuter l’interface graphique du service ou le logiciel de l’opérateur appelé _Controls.
- L’ordinateur doit être connecté au même réseau que l’unité de contrôle PhotoRobot.
- Le réseau doit être connecté à Internet.
Vérifiez les paramètres du système de distribution d’électricité, par exemple la tension et la fréquence.
Connectez l’unité de commande au réseau via un câble Ethernet. Le connecteur RJ45 se trouve à l’arrière de l’unité de contrôle. La configuration réseau de base requise est la suivante :
- Un serveur DHCP dans le réseau est attendu.
- La communication sur les ports TCP 7777, 7778 doit être autorisée.
- Les diffusions UDP sur le port 6666 doivent être autorisées.
- Une connexion Internet est nécessaire.
- *. photorobot.com accès doit être autorisé.
- as-unirobot.azurewebsites.net accès doit être autorisé.
- Reportez-vous à la section Prérequis de mise en réseau détaillés de PhotoRobot pour plus d’informations si nécessaire.
- Branchez la fiche d’alimentation à la prise de courant.
Appuyez sur l’interrupteur d’alimentation situé sur le panneau avant de l’unité de commande. Lorsqu’il passe d’un voyant clignotant à un voyant fixe, il est prêt à fonctionner.
3.1. Trouver l’adresse IP de PhotoRobot sur le réseau local
Il existe des applications de support disponibles pour la recherche de PhotoRobot sur le réseau.
- Windows - frfind pour Windows
- Mac OS X - frfind pour macOS
- Android - PhotoRobot Locator dans Google Play
- iPhone, iPad - PhotoRobot Locator sur iTunes
3.2. Test de base de PhotoRobot
Sur un ordinateur, ouvrez un navigateur Web et entrez l’adresse IP de PhotoRobot au format URL, par exemple : https://11.22.33.44 (veuillez noter que cette adresse n’est qu’un exemple - entrez l’adresse IP que vous avez trouvée dans la section ci-dessus).
Si tout fonctionne comme prévu, vous verrez une interface utilisateur de base similaire au graphique ci-dessous :

Allumez les moteurs (flèche 1) et essayez de faire fonctionner n’importe quelle partie mobile du robot (flèche 2). Si le robot se déplace en fonction de vos instructions, vous êtes prêt à utiliser régulièrement votre appareil PhotoRobot.


Série EOS Rebel


Série EOS DSLR


Série EOS M sans miroir


Série PowerShot


Gros plan / À main levée

La série Canon EOS Rebel propose des appareils photo reflex numériques adaptés aux débutants avec une qualité d’image solide, des commandes intuitives et des fonctionnalités polyvalentes. Idéal pour les amateurs de photographie, ces appareils photo offrent une mise au point automatique fiable, des écrans tactiles orientables et un enregistrement vidéo Full HD ou 4K.
Connexion
Résolution (MP)
Résolution
La série Canon EOS DSLR offre des images de haute qualité, une mise au point automatique rapide et une polyvalence, ce qui la rend idéale pour la photographie et la production vidéo.
Connexion
Résolution (MP)
Résolution
La série Canon EOS M Mirrorless combine un design compact avec des performances similaires à celles d’un reflex numérique. Dotés d’objectifs interchangeables, d’un autofocus rapide et de capteurs d’image de haute qualité, ces appareils photo sont parfaits pour les voyageurs et les créateurs de contenu à la recherche de portabilité sans sacrifier la qualité d’image.
Connexion
Résolution (MP)
Résolution
La série Canon PowerShot propose des appareils photo compacts et conviviaux pour les photographes occasionnels et les passionnés. Avec des modèles allant du simple appareil photo compact aux appareils photo zoom avancés, ils offrent commodité, une qualité d’image solide et des fonctionnalités telles que la stabilisation d’image et la vidéo 4K.
Connexion
Résolution (MP)
Résolution
Les appareils photo rapprochés et portables de Canon sont conçus pour la photographie et la vidéo détaillées et rapprochées. Compacts et faciles à utiliser, ils offrent une mise au point précise, une imagerie haute résolution et des capacités macro polyvalentes, parfaites pour le vlogging, la photographie de produits et les gros plans créatifs.


