Configuration d’un espace de travail PhotoRobot
Le manuel d'utilisation suivant décrit les étapes de configuration d'un Espace de travail dans l'application PhotoRobot Controls (ci-après « CAPP »). Un espace de travail est une liste de matériel qui sera utilisé pour une séance photo spécifique. Il peut inclure divers modules PhotoRobot, caméras, lumières et autres accessoires.
Note : Si vous n'avez pas encore installé et familiarisé avec CAPP, veuillez vous référer à PhotoRobot Démarrage rapide pour un aperçu du logiciel, de sa configuration et de son utilisation. Les informations contenues dans ce manuel d'utilisation visent à aider les clients qui ont déjà une compréhension générale du logiciel.
De plus, à des fins de démonstration, notez qu'il est possible de travailler avec un Espace de travail d'exemple prédéfini, qui est configuré pour utiliser du matériel virtuel. Un espace de travail d'exemple permet aux utilisateurs d'expérimenter diverses fonctionnalités dans CAPP en sélectionnant des robots et des caméras virtuels.
Pour créer un espace de travail, allez dans Espaces de travail dans CAPP, puis appuyez sur le bouton créer (+).
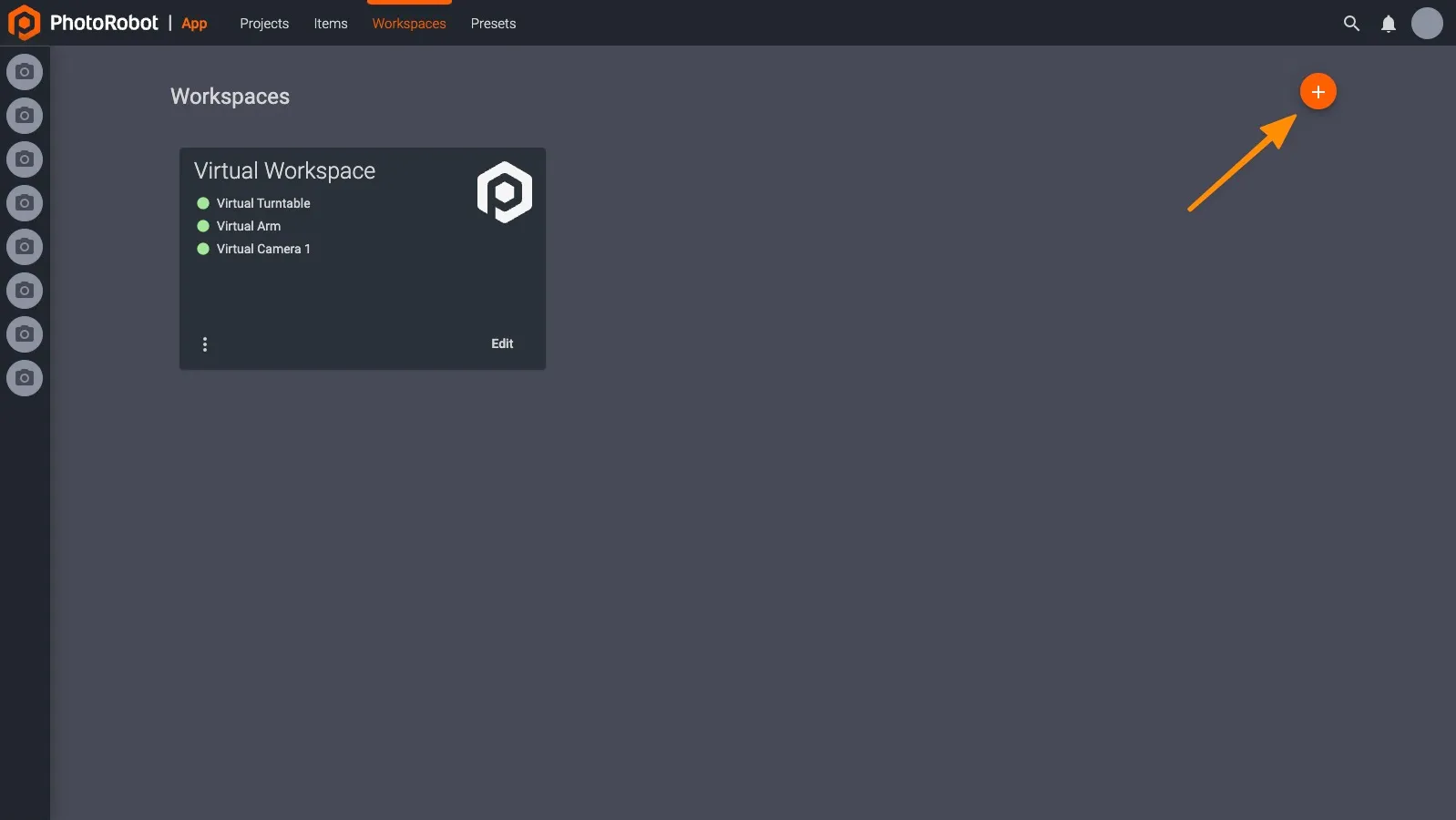
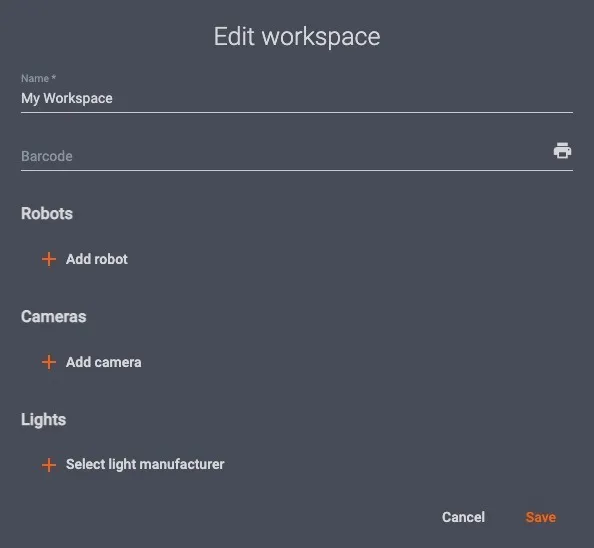
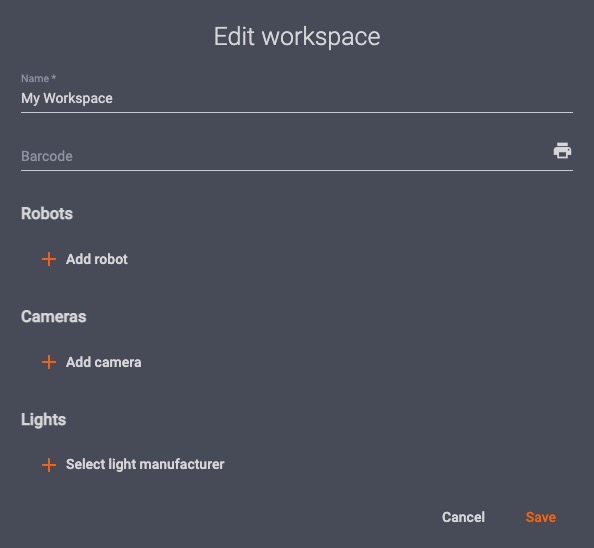
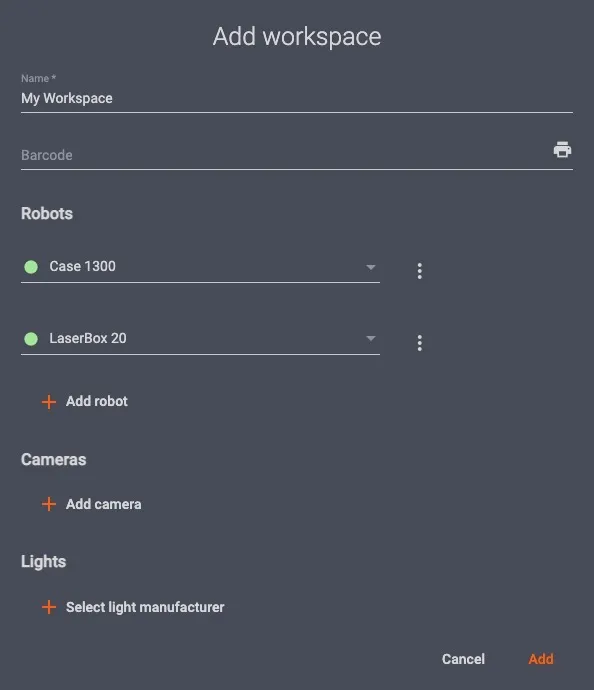
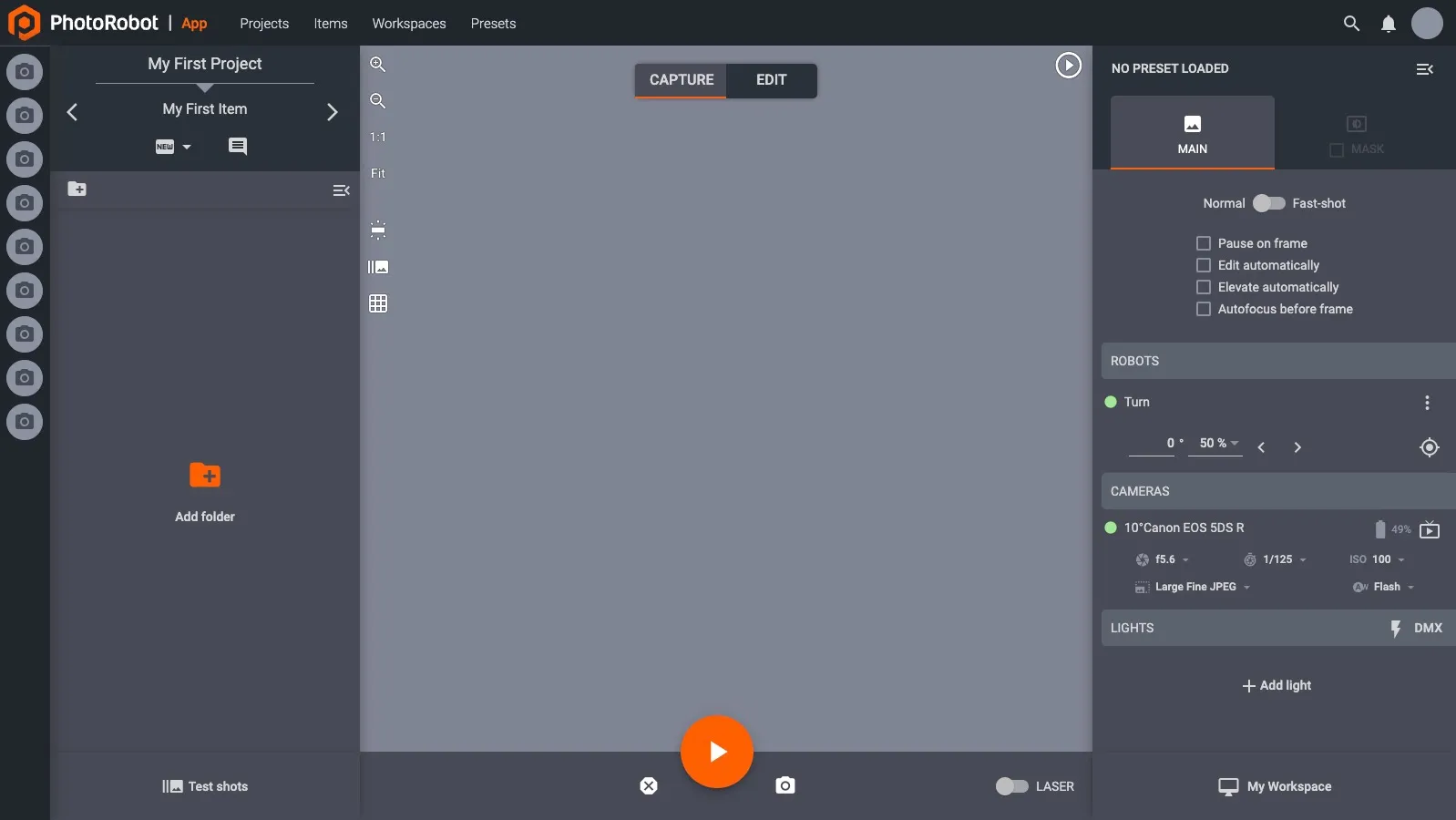
Appuyer sur le bouton de création ouvrira le menu de l'espace de travail d'édition où il est possible d'Ajouter un robot, d'Ajouter une caméra et de Sélectionner un fabricant de lumière.
Sachez qu'après avoir connecté un matériel (ou une caméra) à un espace de travail, vous pouvez immédiatement voir s'il est en ligne (reconnu par CAPP). Pour ce faire, vérifiez la couleur du point à gauche du nom de l'équipement donné. Si l'appareil est reconnu, il y aura un point vert.

Alternativement, un point gris signale que le matériel n'a pas été reconnu ou qu'il n'est pas allumé. S'il y a un point rouge, il y a une erreur, par exemple l'utilisateur n'a pas mis l'appareil photo en mode manuel. Pour identifier la cause de l'erreur, passez la souris sur le point rouge pour afficher une info-bulle avec une description de l'erreur.
Pour les problèmes courants et leurs solutions, veuillez vous référer au Manuel de dépannage PhotoRobot.
Ajouter un robot
Dans l’étape suivante, assurez-vous que tous les robots pour la séance photo sont allumés et connectés au même réseau local que votre ordinateur. Appuyez ensuite sur Ajouter un robot.
- Appuyez sur Ajouter un robot pour afficher la liste des robots disponibles.
- Sélectionnez les robots que vous utiliserez dans la liste.
Configurer Fast-Shot
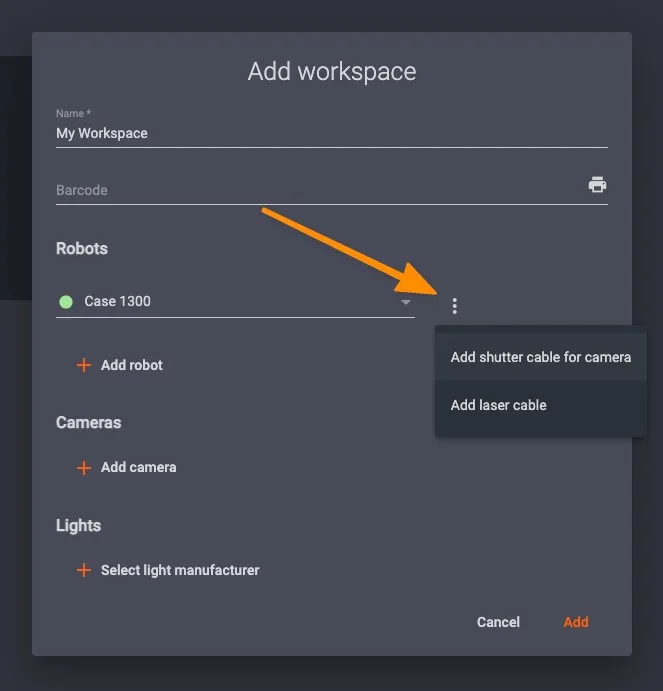
Pour activer le mode Fast-shot, connectez tous les robots à un appareil photo via un câble d’obturateur.
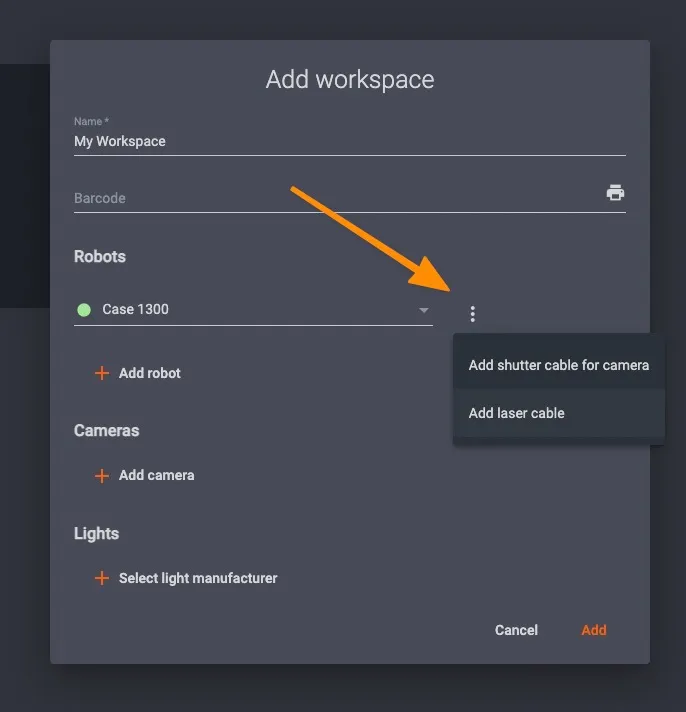
- Cliquez sur les trois points verticaux à droite du robot pour ouvrir le menu de la caméra.
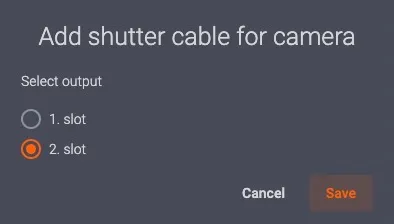
- Sélectionnez Ajouter un câble d’obturateur pour l’appareil photo.
- Choisissez Emplacement de sortie (1 ou 2). Sélectionnez l’emplacement de sortie en fonction du câblage physique de votre câble d’obturateur. Pour les câbles de PhotoRobot, utilisez l’emplacement 2.
( ! ) - Pour les autres fabricants, il pourrait être nécessaire d'utiliser l'emplacement 1.
Configurer les lasers
Selon le matériel utilisé, il existe plusieurs options pour configurer les lasers :
Pour les lasers intégrés
Le Case 850 et le 1300 ont tous deux des systèmes laser conçus dans le robot sans aucune configuration requise.
LaserBox 20 ports
La LaserBox à 20 ports est un appareil autonome qui permet de contrôler plusieurs lasers via une connexion réseau. Pour configurer la LaserBox, assurez-vous d’abord qu’elle est allumée, puis ajoutez-la en tant que robot supplémentaire à l’espace de travail :
LaserBox 4 ports
Si vous avez une LaserBox à 4 ports connectée à votre robot, sélectionnez Ajouter un câble laser dans les éléments de menu à 3 points à droite de l’ID du robot :
Ajouter des caméras
Pour ajouter un appareil photo, assurez-vous d’abord que l’appareil est allumé et connecté via USB à l’ordinateur. Si vous n’utilisez pas un robot capable de pivoter (par exemple, le bras robotique ou le cadre), vous devrez également définir l’angle auquel la caméra ciblera la table.
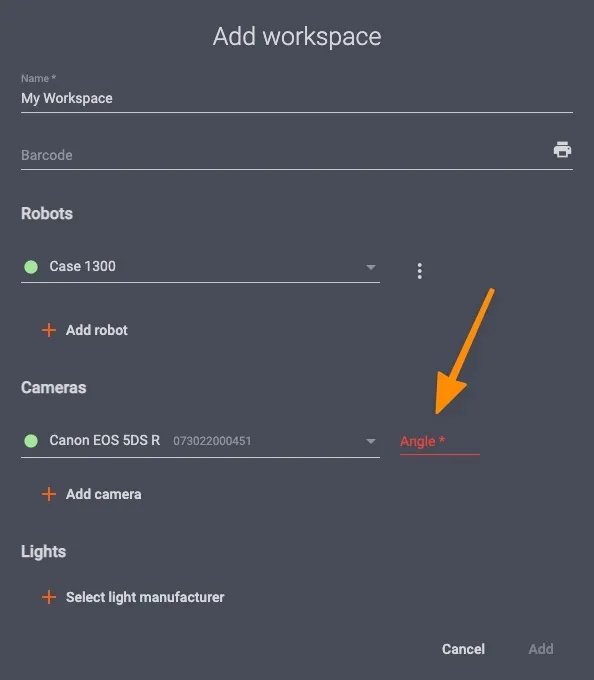
( ! ) - Le réglage de l'angle pour les robots sans capacité de balancement est nécessaire pour que certaines fonctionnalités, telles que le centrage automatique, fonctionnent.
( * ) - Voir la liste complète des caméras compatibles PhotoRobot.
Configurer les lumières
Les systèmes d’éclairage compatibles avec PhotoRobot comprennent deux types de lumières : les lumières stroboscopiques de FOMEI et Broncolor, ou toutes les lumières LED prenant en charge DMX. Pour configurer une configuration d’éclairage dans le menu de l’espace de travail, accédez à Lumières et ajoutez des lumières compatibles dans Sélectionner le fabricant de l’éclairage.
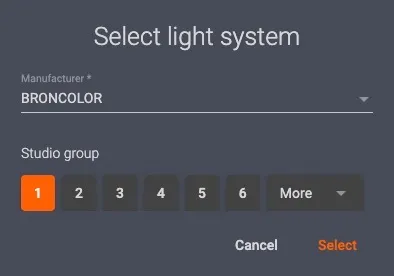
Flashs stroboscopiques - Broncolor
Pour configurer les lumières Broncolor, sélectionnez d’abord BRONCOLOR, puis choisissez parmi le groupe de lumières Studio sur lequel vous souhaitez contrôler :
Flashs stroboscopiques - FOMEI
Pour les lumières de FOMEI, les utilisateurs disposent de deux options de contrôle :
Émetteur-récepteur LAN FOMEI (méthode préférée)
Pour le contrôle des lumières via l’émetteur-récepteur LAN FOMEI, assurez-vous d’abord qu’il est en ligne et connecté à votre réseau.
Ensuite, sélectionnez LAN. Puis, sous LAN dans le menu déroulant, sélectionnez Fomei LAN Transceiver.

Dongle USB FOMEI (Hérité)
Il est également possible de contrôler les lumières avec le dongle WiFi de FOMEI connecté directement à votre ordinateur via USB.
( ! ) Sachez que cette méthode n’est plus recommandée. Cela est dû au fait qu’il nécessite l’installation de pilotes supplémentaires sur votre ordinateur. FOMEI ne prend également plus en charge les nouveaux systèmes MacOS.
Lumières LED - DMX
Pour contrôler toutes les lumières LED compatibles avec le protocole DMX, connectez les lumières via un câble RJ45 ou USB au robot.
Vous pouvez ensuite sélectionner Light manufacturer DMX.
Plus tard, vous créerez une lumière individuelle sur l’écran capture :
Pour chaque lumière, vous pouvez configurer deux canaux :

- Le canal Luminosité permet de contrôler le niveau de luminosité de la lumière sélectionnée.
- Le canal Couleur est pris en charge par certaines lumières et permet d’ajuster les niveaux de couleur.


Série EOS Rebel


Série EOS DSLR


Série EOS M sans miroir


Série PowerShot


Gros plan / À main levée

La série Canon EOS Rebel propose des appareils photo reflex numériques adaptés aux débutants avec une qualité d’image solide, des commandes intuitives et des fonctionnalités polyvalentes. Idéal pour les amateurs de photographie, ces appareils photo offrent une mise au point automatique fiable, des écrans tactiles orientables et un enregistrement vidéo Full HD ou 4K.
Connexion
Résolution (MP)
Résolution
La série Canon EOS DSLR offre des images de haute qualité, une mise au point automatique rapide et une polyvalence, ce qui la rend idéale pour la photographie et la production vidéo.
Connexion
Résolution (MP)
Résolution
La série Canon EOS M Mirrorless combine un design compact avec des performances similaires à celles d’un reflex numérique. Dotés d’objectifs interchangeables, d’un autofocus rapide et de capteurs d’image de haute qualité, ces appareils photo sont parfaits pour les voyageurs et les créateurs de contenu à la recherche de portabilité sans sacrifier la qualité d’image.
Connexion
Résolution (MP)
Résolution
La série Canon PowerShot propose des appareils photo compacts et conviviaux pour les photographes occasionnels et les passionnés. Avec des modèles allant du simple appareil photo compact aux appareils photo zoom avancés, ils offrent commodité, une qualité d’image solide et des fonctionnalités telles que la stabilisation d’image et la vidéo 4K.
Connexion
Résolution (MP)
Résolution
Les appareils photo rapprochés et portables de Canon sont conçus pour la photographie et la vidéo détaillées et rapprochées. Compacts et faciles à utiliser, ils offrent une mise au point précise, une imagerie haute résolution et des capacités macro polyvalentes, parfaites pour le vlogging, la photographie de produits et les gros plans créatifs.


